

Viime viikolla Lapin AMK:lla järjestettiin kaksi käytännönläheistä robottityöpajaa. Ensimmäisenä päivänä tutustuimme ROS (Robot Operating System) käyttöön, sekä Jetson Nanon, Zed 2 stereo kameran sekä RPLIDARin toimintaan Petri Hannulan opastamana. Kävimme myös robottilaboratoriossa katsomassa Eelis Vaaran ja Juho Kujalan työn tuloksia, ja kun robotti ajeli oppimaansa rataa itsenäisesti. ![]()
![]()
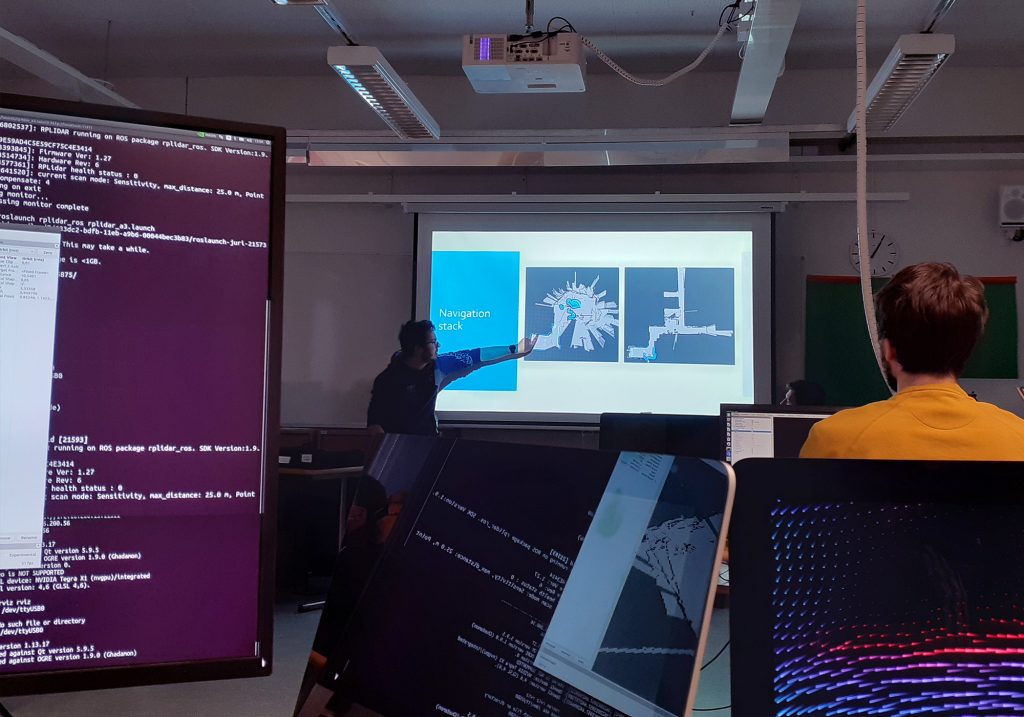
Toisena päivänä tutustuimme vaihto-opiskelijoiden Sam Knoorsin ja Max Valkenburgin opinnäytetyönä rakentamaan Spyker- robottiin, joka käytti liikkumiseen Lidar tutkaa. Robotti osasi itsenäisesti navigoida paikkaan, jota klikattiin huoneesta luodulla kartalla. Käytimme Hectorslamia robotin ohjailuun ”etänä” omalta koneelta, ja lopuksi kävimme testaamassa robottia myös labran puolella. Työpajassa opittiin paljon varsinkin terminaalin käytöstä teknisistä ongelmista huolimatta, kiitos kaikille ohjaajille ja osallistujille! ![]()
![]()








{kind=link}
{kind=link}
{kind=link}